Telephone: 86-18937010258
86-0370-5700888
Phone: 86-18438296999
Email : henanyonggong@163.com
Website: en.hnygjx.com.cn
Production base: 2 xishan road, yongcheng economic and technological development zone, henan province
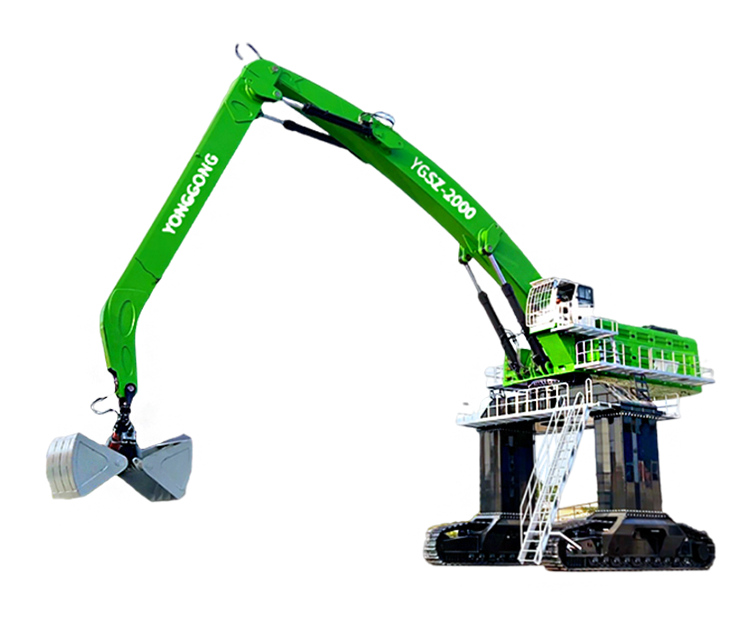
The steel grasping machine is a mechanical device used to carry and grab heavy objects, and its working principle is realized through the combination of mechanical system and hydraulic system.
First of all, the mechanical system of the steel grasping machine is composed of various components, including the chassis of the crane, the rotating platform, the upper beam and the arm and other components. These components are joined together by articulations and connectors to form a structurally solid mechanical system.
The core component of the mechanical system is the crane arm, which is usually composed of multiple segments of telescopic mechanical arms. These arm segments are connected together by hydraulic cylinders and hinges, allowing the arm to expand and fold. By controlling the telescopic movement of the hydraulic cylinder, the length and Angle of the arm can be changed to realize the grasping of items in different ranges and angles.

In addition, the mechanical system of the steel grab machine also includes a rotating platform, which is the base of the crane and can achieve a 360-degree rotation of the crane. The rotating platform is usually driven by an electric motor and rotates through a gear, chain, or hydraulic system. In this way, the operator can adjust the grasping machine to the appropriate position and Angle by controlling the direction and speed of the rotating platform for the grasping and handling of items.
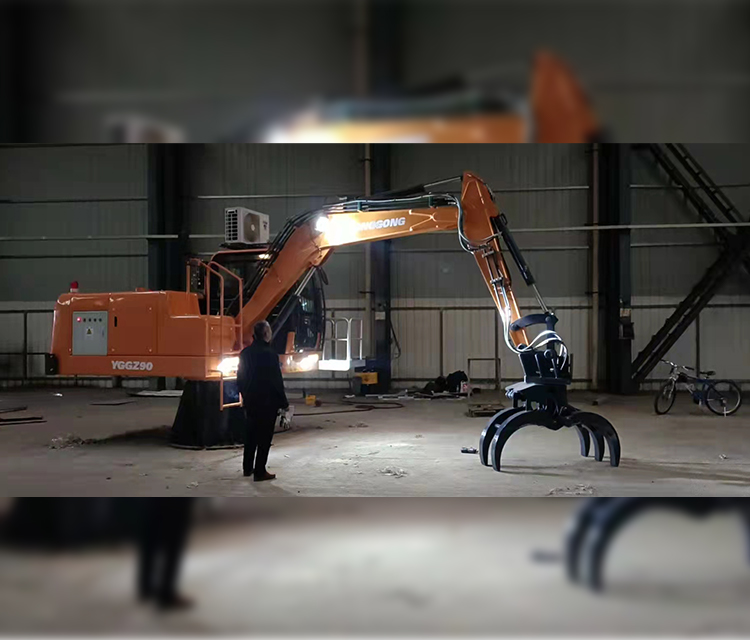
Then, the hydraulic system of the grasping machine is an important part of the grasping function. Hydraulic system is usually provided by hydraulic pump hydraulic capacity, and through the hydraulic pipeline and control valve to achieve force transfer and control. By controlling the opening and closing of the valve and the working pressure of the hydraulic pump, the hydraulic system can generate enough force to realize the expansion and expansion of the arm of the grasping machine, the rotation of the rotating platform and the opening and closing of the grasping device.
In the hydraulic system of the grasping machine, the hydraulic pump draws the hydraulic oil from the tank and transmits it to the actuator such as the hydraulic cylinder and the hydraulic motor through the hydraulic pipeline. When the operator opens the hydraulic valve, the hydraulic oil enters the hydraulic cylinder or the hydraulic motor, causing it to move. When the operator closes the valve, the hydraulic oil flows back into the tank, completing the circulation of the hydraulic system.
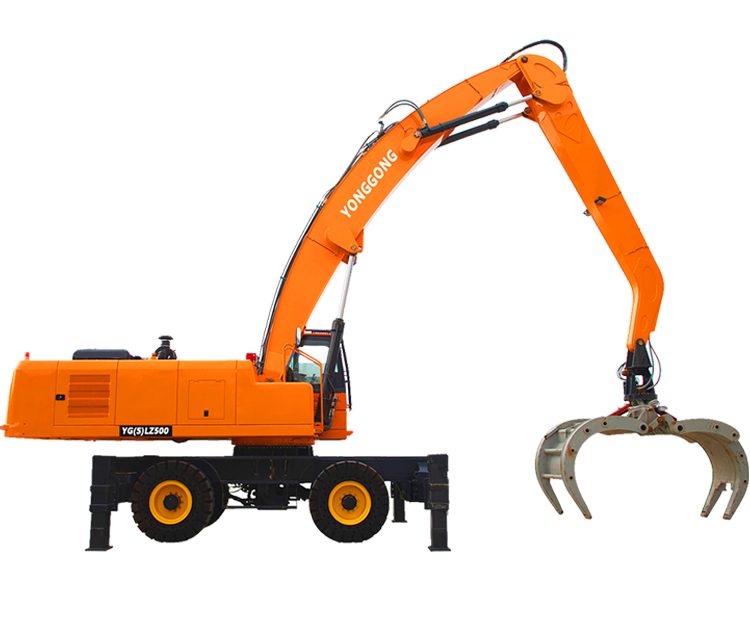
Finally, the working principle of the grasping machine is to control the controller of the grasping machine through the operator, and realize the grasping and handling work by effectively combining the role of the mechanical system and the hydraulic system. For example, the operator can control the start and stop of the hydraulic pump through the controller, and adjust the opening and closing of the hydraulic valve to control the action of the steel grab machine. By timely controlling the working pressure of the hydraulic pump and the opening and closing degree of the valve, the telescopic arm, the rotating platform rotation and the opening and closing of the grabber can be realized, so as to achieve the purpose of grabbing and transporting goods.
In short, the working principle of the steel grasping machine is the synergy of the mechanical system and the hydraulic system, and the function of grasping and moving heavy objects is realized through the control of the operator. This device is widely used in industrial production and construction fields, which greatly improves production efficiency and labor efficiency.